乐鱼真人
H
热销产品

H
热点新闻C
联系我们光电编码器因测量精度高,在伺服用永磁同步电机位置检测中大范围的应用。但它有抗震性差的缺点,难以适应恶劣工况。具有抗震性好、耐腐蚀、耐高温和易实现高速位置检测的优点,通常在矿山、纺织用伺服系统、航空用电力作动系统等恶劣环境中应用。
旋转变压器与光电编码器不同,它是一种机电元件,需要将其输出的模拟电压信号转换为数字信号才可输入到dsp控制芯片。本文选用多摩川公司的旋转变压器数字转换器(rdc)au6802n1,设计了一套旋变解码的接口电路板。同时基于永磁电机矢量控制平台对该接口电路进行了实验验证。实验表明该设计的具体方案确实可行,并取得了较好的位置检测效果。
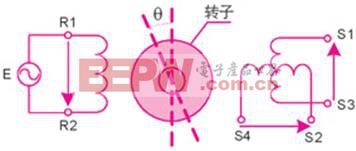
旋转变压器是一种单相激励双相输出无刷旋转变压器。如图1所示,激磁绕组(原边)r1-r2和两套输出相互正交的绕组(副边)s4-s2、s3-s1同在定子侧,固定在电机定子上,转子与电机转子同轴安装。当原边的激磁绕组流过正弦电流时,副边输出绕组两端会感应出同频率的电势,电势的大小与定转子间的相对电角度有关。
其中,ω为激磁电源的角频率;us4-s2,us3-s1为两相正交绕组(正弦绕组和余弦绕组)的输出电压。k为传输电压比,θ为转子位置角。
本设计旋转变压器选用多摩川公司的ts2640n321e64。其主要性能参数如表1所示。
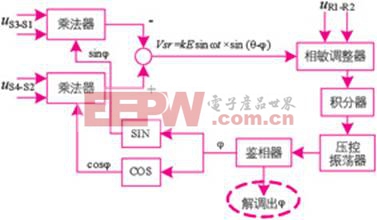
图2给出了au6802n1芯片解码的原理框图。由图可知,au6802n1内部是一个闭环系统。旋转变压器的四线端输出来的信号通过调理电路进入au6802n1芯片的s1、s2、s3和s4端,经过处理输出到余弦和正弦乘法器上。通过后级的加减电路,得vsr=kesinωt×sin(θ-)此时根据外部激励r1、r2端的同步相位检测器的当前状态,从代表了某一起始角鲎攀郑黄魇酝剂鹘谑纸泅,使该角等于待测模拟角并跟踪θ。当调整到vsr=0时,即有=θ。此时可逆计数器的字状态龅淖唤峁创砹诵溲蛊魇涑龅闹峤铅鹊亩剖种怠8檬种悼梢运透扑慊允净駾sp控制芯片进行处理。
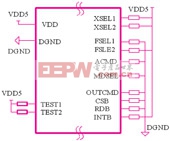
au6802n1能够最终靠设定对应的控制位来选择工作模式。其控制位大致上可以分为以下几种:
(1) 输出模式设置:输出模式分为三种——并行i/o口模式、spi通信模式、abz脉冲模式,可通过outmd、csb、rdb、intb四个引脚的电平来设定,详细设定参考文献[1]。
(2) 系统控制模式设置:通过设定acmd引脚电平得到。acmd=h时,系统选择加速模式;反之,选择正常模式。通常运行时设定为正常模式,当角加速度较大时,切换到加速模式,能够得到更高的位置检测精度。
(3) 分辨率设置:mdsel=h时,输出数据选择12位;反之,输出数据选择10位。
(4) 极对数设置:电机的极对数设置可通过设定xsel1和xsel2引脚得到,如下表2所示。
(5) 励磁频率设置:励磁信号rso频率可通过设定fsel1和fsel2得到,如表3所示。
(6) 测试模式设置:可通过引脚test1和test2设定。通常将两引脚都拉高至vdd,不影响正常工作。
本设计选取au6802n1工作在脉冲输出模式和spi通信模式,数据分辨率为12位,极对数设定为1,励磁频率为10k,控制模式为正常模式,测试位不使能。其电路图如图3所示,图中所有电阻值均为33ω。
为了给旋转变压器的励磁绕组提供满足规定的要求的高品质正弦波励磁信号,同时使所接收到的旋转变压器正/余弦信号能够很好的满足芯片对输入信号幅值与相位的要求,需要加入额外的信号处理电路。
au6802n1外围主电路包括激励调理电路、反馈滤波调理电路和dsp接口电路。电路图如图4所示。
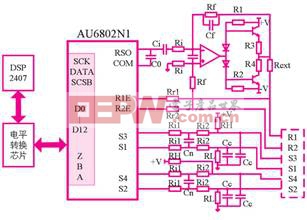
激励调理电路设计激励信号调理电路是用来给旋转变压器提供激励输入信号。au6802n1芯片的rso/com输出的激励信号是基于2.5v且vp-p=2v的31级内插正弦波(vrso=1.5v~3.5v的正弦波电压),输出功率太小,是不能直接驱动旋转变压器励磁绕组的。因此就需要设计激励调理电路,完成激励信号放大的任务。
激励调理电路的拓扑分为双电源和单电源供电两种,本文选取双电源booster功率放大电路,可节省器件开销。电路基本工作原理为rso/com输出经过隔直电容ci后,取到有效的交流信号,再经过后级的运放和npn、pnp三极管互补推挽电路进行功率放大,最终得到正弦度较好的激磁电压信号。为了能够更好的保证系统的稳定性,加入cf来补偿相位。输出励磁信号的幅值可通过调节rext来实现。参数设计通常满足以下原则:rex≤zro/10ω(zro为旋变输入阻抗,见表1),rf≥50kω,ri×ci500μs,rf×cf5μs。本设计的具体方案参数选取分别为:运放选用tl082c,±v为±15v,c0=470pf,ri=22k,ci=0.01uf,rf=100k,cf=100pf,r1=r2=3.3k,r3=r4=4.7ω,rext=10ω。
旋转变压器输出的正余弦信号是不能直接送给rdc的,里面可能含有许多干扰信号,一定要经过调理滤波,满足规定的要求之后,才能送给rdc。反馈调理滤波电路有4个功能:设定输入增益、抑制共模干扰、过滤外界噪音干扰、检测s1-s4断线故障。
输入增益的选取原则为:根据旋变信号(s1-s4)电压级别,将信号调整到大概为2-3倍的vp-p,才能送给au6802n1。由此可确定增益g的大小,同时g满足如下计算公式:
![]()
电阻ri1、ri2选用精度与输出数据分辨率有关。输出数据分辨率为10位时,电阻精度≤1%;分辨率为12位时,电阻精度≤0.25%。
电路中, 两个电容cc的参数相同,起抑制共模干扰信号的作用;电容cn 和两个ri1电阻构成了低通滤波器,过滤外界噪音干扰,滤波器定时常数由外部环境决定,计算公式为:
![]()
直流电源vext和电阻rbh、rbl起检测信号线断线故障的作用,取值通常在小于旋变输出阻抗范围内尽可能大。
旋变励磁信号反馈给r1e、r2e时,必须串入电阻进行分压,分压之后的电压不能超过au6802n1供电电源vcc。本设计取rr1=rr2=240k。此外,当旋转变压器信号s1-s3和s2-s4的激励单元和激励旋转变压器的外部输入信号r1e与r2e间有相位差,则r/d转换器的环路增益会相应地下降。通常相位差10°这能够最终靠增加电容调节电路相位差。由表1可知,励磁信号输入相移-5°,可以不加电容进行相位补偿。
dsp接口电路为转速数字信号提供了方便的接口。数据传送方式分为三种:并行i/o口模式,abz脉冲模式,spi通信模式。本设计采用后两种方式。由于au6802n1的输出数字信号为5v电平,dsp为3.3v电平,因此中间需要加入电平转换芯片,保证电平的匹配。
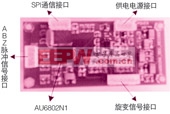
如图5所示,为au6802n1硬件接口电路板。提供了四种接口:分别为电源接口、旋变接口、abz脉冲信号接口和spi通信接口。电源接口提供给au6902n1的供电电压+5v和旋变励磁供电电压±15v,旋变信号接口提供旋变励磁信号和接受正余弦反馈信号,同时该板兼容两种转速信号输出方式:spi通信方式和abz脉冲信号方式,实际应用时可供不一样的需要灵活选取,且互不冲突,易实现与dsp通信。
利用saber对au6802n1外围主电路电路图进行仿真,激磁调理电路仿线所示。将硬件电路板应用在五对极永磁同步电机驱动系统中,此时试验中给定旋变励磁信号为10khz,当电机工作在5000rpm时,测试结果为:图7为au6802n1接收到的旋变正弦信号和余弦信号波形图。图8为au6802n1 以脉冲接口工作模式输出给dsp控制器后,输出的实际转子位置波形图。由此可见,该硬件电路及其参数设计正确可行。
基于多摩川公司的au6802n1所设计的旋转变压器信号接口电路简单可靠,信号输出模式灵活,与dsp数字信号处理器之间接口方便。通过仿真和实验可见,该接口电路输出的位置信号波形品质好,无毛刺并具备很强抗干扰能力,可实现位置检测,并具有较高的精度,因此本文设计的au6802n1硬件接口电路及其参数正确可行。这在高可靠性和高速运行的交流伺服系统中,具备极高的应用价值
400mA、高输出压摆率,纳芯微NSOPA240x系列破解旋转变压器之“难”
SAL-TC389QP-160F300SAE是否有专门用于旋转变压器安全的安全机制?
TDK推出采用3D HAL技术并具备模拟输出和SENT接口的位置传感器
Microchip业界最全面的电感式位置传感器系列现已推出符合ISO 26262标准的适用于电动汽车电机控制应用的解决方案
发动机控制单元、冷却液温度传感器、凸轮轴、位置传感器、发动机温度传感器电路图
Allegro MicroSystems针对ADAS 应用推出开创性的新型位置传感器
基于 Infineon 霍尔技术的TLE4997在电子节气门位置传感器ETC 优选器件方案
永磁同步电机无位置传感器系列(2)——关于ESO-PLL(基于扩张状态观测器的高阶锁相环)的分析